Preparing processors
The algorithm consists of multiple processors that can be combined to produce the desired results.
When creating a list of processors, ALWAYS the first in the list of processor must be DetectCarMaskProcessor or DetectInteriorMaskProcessor.
Subsequent processors are executed in the order in which they were entered in the configuration.
ReadExifDataProcessor
It is used to read data from the Exif. Reading the data makes it possible for the stabilization to work better.
Example of usage
[
{
"processorName": "ReadExifDataProcessor"
},
{
"processorName": "DetectCarMaskProcessor",
"carDetectionThreshold": 0.0,
"carCropThreshold": 0.0
},
{
"processorName": "CarKeyPointsProcessor",
"carDetectionThreshold": 0.0
},
{
"processorName": "InterestPointsDetectionProcessor",
"scale": 0.5
},
{
"processorName": "SpinStabilizationProcessor",
"scale": 0.5,
"csMode": true,
"ellipticTrack": true
},
{
"processorName": "AnchoringComputeProcessor",
"width": -1,
"height": -1,
"billboards": [
"none"
],
"backgroundDirectory": "platform_12",
"billboardReflection": false,
"carScale": 0.55,
"cropCar": true,
"keepCarOnImage": true,
"marginLeft": 0.15,
"marginRight": 0.15,
"marginUp": 0.2,
"marginDown": 0.1,
"aspectRatio": "4:3",
"photosSorted": false,
"reverseYaw": true,
"billboardsPatternMode": null,
"singleBillboardHeight": -1.0
},
{
"processorName": "AnchoringApplyProcessor"
},
{
"processorName": "DetectCarShadowProcessor"
},
{
"processorName": "PlaceShadowProcessor",
"background": "original",
"shadowOpacity": 0.9,
"shadowSize": 0.5,
"advancedShadowEnabled": true,
"advancedShadowShift": 0.25,
"advancedShadowStrength": 0.5
}
]
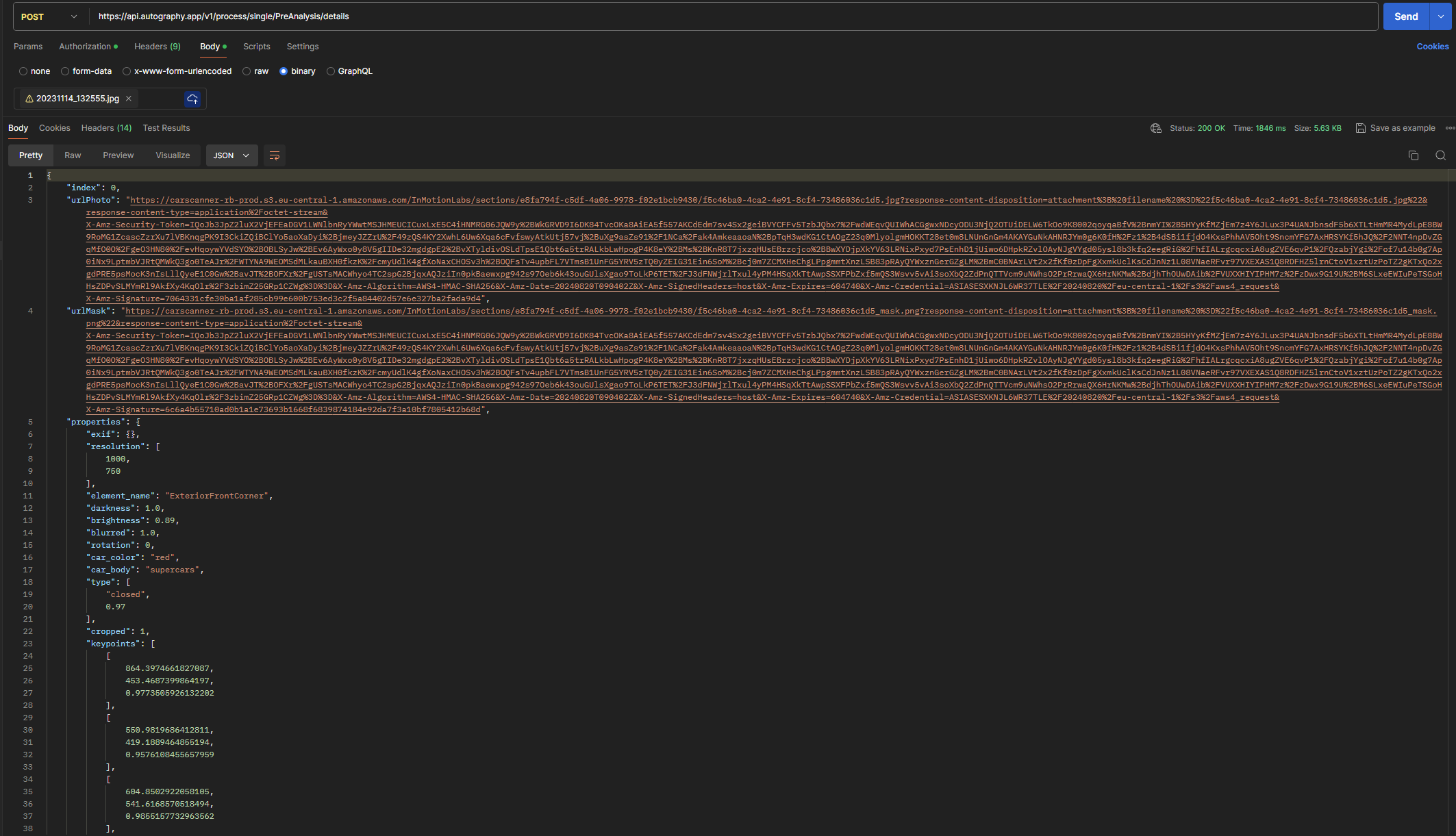
PreAnalysisProcessor
Processor uses: CarKeyPointsProcessor, CarBodyClassificationProcessor, CarColorClassificationProcessor, ImageQualityProcessor.
When elements on picture will be detected of:
-
Internal elements (
BackSeat,BackupCamera,Dashboard,DoorOpenView,DoorPanel,FrontSeat,GearShift,InfotainmentSystem,Mileage,Navigation,Panorama,SeatButtons,StartStopButton,SteeringWheel,SteeringWheelButtons,Sunroof). Processor returns properties:element_name,brightness,darkness,blurred,resolution,rotation,interdet_bbox. -
ExteriorWholeSideElement (
ExteriorBack,ExteriorBackCorner,ExteriorFront,ExteriorFrontCorner,ExteriorSide). Processor returns properties:element_name,brightness,darkness,blurred,resolution,rotation,car_bbox,keypoints(LeftBackWheelBottom,RightBackWheelBottom,LeftFrontWheelBottom,RightFrontWheelBottom),car_color,cropped,angles,doors open. -
ExteriorWholeOtherElement: (
ExteriorTop). Processor returns properties:element_name,brightness,darkness,blurred,resolution,rotation,car_bbox,car_color,cropped. -
ExteriorDetailElement: (
Trunk,Wheel,WingMirror,Light,Engine). Processor returns properties:element_name,brightness,darkness,blurred,resolution,rotation. -
OtherElement: (
VIN,Info,Keys). Processor returns properties:element_name,brightness,darkness,blurred,resolution,rotation.
Parameters
savetrue/false, by defaultfalse. Iftruesaves original image and with new extension, which is taken from configuration file, if uploaded image is, for example, rotated by 90 degrees, then original image is saved as well as rotated one with new extension to position 0.
Example of usage
[
{
"processorName": "PreAnalysisProcessor",
"save": false
}
]
Example result
ClassificationProcessor
It is used to check what is present in the picture. This processor is primarily utilized when subsequent steps are based on the object in the photo - for example, a shadow overlay processor interprets values generated by this processor. The processor is utilized in the following:
- Default classification configuration - this configuration should be invoked by the client to classify the photo and then send the photo to the final configuration. More information about the configuration.
Decision-makingprocessing calls. More information here.
The processor supports the following classes:
BackSeat, BackupCamera, Dashboard, DoorOpenView, DoorPanel, Engine, ExteriorBack, ExteriorBackCorner, ExteriorFront, ExteriorFrontCorner, ExteriorSide, ExteriorTop, FrontSeat, GearShift, Info, InfotainmentSystem, Keys, Light, Mileage, Navigation, Panorama, SeatButtons, StartStopButton, SteeringWheel, SteeringWheelButtons, Sunroof, Trunk, VIN, Wheel, WingMirror.
Sample images of supported classes
BackSeat



ClimateControl



Dashboard



DoorOpenView



DoorPanel



Engine



FrontSeat



GearShift



Info



Keys



Light



Mileage



Navigation



Panorama



SteeringWheel



SteeringWheelButtons



Sunroof



Trunk



Wheel



WingMirror



InfotainmentSystem



SeatButtons



VIN

BackupCamera



ExteriorTop



ExteriorBack



ExteriorBackCorner



ExteriorFront



ExteriorFrontCorner



ExteriorSide



In addition, with this processor it is possible to check the orientation of the image taken (0°, 90°, 180°, 270°) and rotate it if necessary.
Parameters
checkAngletrue/false, by defaultfalse.trueReturn information on the orientation of the photo.rotatetrue/false, by defaultfalse.trueRotate the photo if it is not uploaded in the right orientation. To enablecheckAnglemust be set totrue.angleScoreThreshold- Value from 0 to 1, by default0.5. Threshold of correct detection of rotation angle. Rotate if the probability of correct rotation is greater than the set value. For 1 photo will never be rotated. For0, the photo will always be rotated if another photo rotation is detected, and the parameters:rotateandcheckAngleset totrue.
Example of usage
[
{
"processorName": "ClassificationProcessor",
"checkAngle": true,
"rotate": true,
"angleScoreThreshold": 0.5
},
{
"processorName": "ReadExifDataProcessor",
"rotate": true
},
{
"processorName": "DetectCarMaskProcessor",
"carDetectionThreshold": 0.0,
"carCropThreshold": 0.0,
"estimateMaskScore": false
},
{
"processorName": "CarKeyPointsProcessor",
"carDetectionThreshold": 0.0
},
{
"processorName": "WindowSegmentationProcessor",
"confidenceThreshold": 0.3
},
{
"processorName": "SemiTransparentWindowsProcessor",
"windowTransparency": 0.15,
"windowBrightness": 0.0,
"minWindowSize": 0.001,
"minWindowBrightness": 0.15
},
{
"processorName": "ChangePlateProcessor",
"background": "#ffffff",
"blurKernelSize": 0.5,
"manageAllPlates": false
},
{
"processorName": "PlaceCarComputeProcessor",
"platformDirectory": "handmade",
"width": -1,
"height": -1,
"cropCar": true,
"keepCarOnImage": true,
"marginLeft": 0.15,
"marginRight": 0.15,
"marginUp": 0.2,
"marginDown": 0.1,
"aspectRatio": "4:3",
"photosSorted": false,
"reverseYaw": true,
"smoothMovement": false,
"background": "#FFFFFF",
"horizonLine": 0.5,
"platformWidth": 0.8
},
{
"processorName": "AnchoringApplyProcessor"
},
{
"processorName": "DetectCarShadowProcessor",
"detail": false
},
{
"processorName": "PlaceShadowProcessor",
"background": "original",
"shadowOpacity": 0.9,
"shadowSize": 0.5,
"advancedShadowEnabled": true,
"advancedShadowShift": 0.25,
"advancedShadowStrength": 0.5
}
]
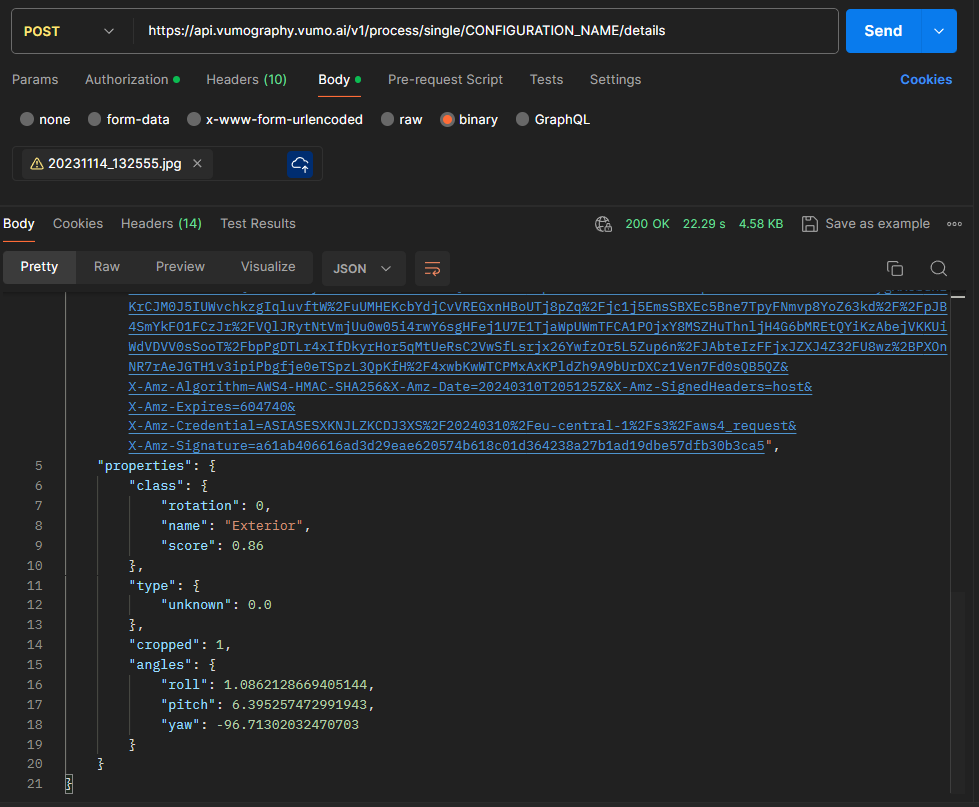
Example result

To read the detected class of the element in the photo and the angle of rotation with probability, use endpoint, which returns the detail information:
Example endpoints
/v1/process/single/{configurationNameOrDecision}/details /v1/process/single/url/{configurationNameOrDecision}/async/details /v1/process/multiple/{configurationNameOrDecision}/details /v1/process/multiple/urls/{configurationNameOrDecision}/details
Example result
DetectCarMaskProcessor
It extracts the car segmentation mask for external images of vehicles with all doors closed ar all doors open. It has to be called at the beginning of the scope.
Proper Scope
Do not forget to replace background, for example, by calling CleanBackgroundProcessor.
Parameters
carDetectionThreshold- Value from 0 to 1, by default0.0. Threshold for car detection score. If no car is detected above the threshold, an error will be reported:Client side processing error due to: Car not found in the image.Note if you specify a value of1the system always returns an error.carCropThreshold- Value from 0 to 1, by default0.0. - Set if you want to reject photos where the car is cut off. A value of 1 means that only uncut cars are allowed. If car is cut off above the threshold, an error will be reported:Client side processing error due to: The car in this image is cut off.
carCropThreshold description in the images



Output Properties
check process photo details.
segmentation_score- Value from 0 to 1. 1 means best score; 0.5 is acceptable.
Example of usage
[
{
"processorName": "DetectCarMaskProcessor",
"carDetectionThreshold": 0.6,
"carCropThreshold": 0.7
},
{
"processorName": "CleanBackgroundProcessor",
"enableShadow": false,
"color": "#C0C0C0"
}
]
Example result
CarKeyPointsProcessor
It is used auxiliary to some processors. You have to call it up beforehand when you want to use in your setup:
AnchoringComputeProcessor,HorizontalStabilizationComputeProcessor,PlaceCarComputeProcessor,RollCompensationProcessor,advancedShadowEnabled: true in thePlaceShadowProcessor,useKeypoints: true in thePlaceCarProcessorandHorizontalBlurProcessor.
Parameters
carDetectionThreshold- Value from 0 to 1, by default0.0. Threshold for car detection score. If no car is detected above the threshold, an error will be reported:Client side processing error due to: Car not found in the image.Note if you specify a value of1the system always returns an error.
Example of usage
[
{
"processorName": "DetectCarMaskProcessor"
},
{
"processorName": "CarKeyPointsProcessor",
"carDetectionThreshold": 0.6
},
{
"processorName": "DetectCarShadowProcessor"
},
{
"processorName": "PlaceShadowProcessor",
"background": "#FFFFFF",
"shadowOpacity": 0.9,
"shadowSize": 0.5,
"advancedShadowEnabled": true,
"advancedShadowShift": 0.25,
"advancedShadowStrength": 0.5
}
]
ImageQualityProcessor
Measures image quality - it can be useful together with calling processors with detailed reply.
Parameters
- No parameters required.
Output Properties
image_quality- Values from 0 to 1; 1 means best score; 0.5 is acceptable:darkness: indicates whether the image is to dark or not.brightness: indicates whether the image is to light or not.blurred: indicates whether the image is too blurry or not.
Example of usage
[
{
"processorName": "DetectCarMaskProcessor"
},
{
"processorName": "ImageQualityProcessor"
}
]
InterestPointsDetectionProcessor
It is used auxiliary to some processors. You have to call it up beforehand when you want to use in your setup:
SpinStabilizationProcessor.
Parameters
scale- Value from 0.01 to 1, by default0.5. Scale in which interest points will be detected.
CarBodyClassificationProcessor
The processor is used to adjust the scale of the car based on the detected body type. For this to work, the DetectCarMaskProcessor must be used beforehand.
The processor supports the following classes:
Sedan_coupe, SuperCars, SUV, VAN, Box_truck, Camper, Combi, Hatchback, Heavy_truck, Jeep, Pickup.
Example photos
Sedan_coupe

SuperCars

SUV

VAN

Box_truck

Camper

Combi

Hatchback

Heavy_truck

Jeep

Pickup

Parameters
- No parameters required.
Example of usage
[
{
"processorName": "ReadExifDataProcessor",
"rotate": true
},
{
"processorName": "DetectCarMaskProcessor",
"carDetectionThreshold": 0.0,
"carCropThreshold": 0.0,
"estimateMaskScore": false
},
{
"processorName": "CarKeyPointsProcessor",
"carDetectionThreshold": 0.0
},
{
"processorName": "CarBodyClassificationProcessor"
},
{
"processorName": "AnchoringComputeProcessor",
"width": -1,
"height": -1,
"billboards": [
"none"
],
"backgroundDirectory": "platform_32_5",
"billboardReflection": true,
"carScale": 1.0,
"cropCar": true,
"keepCarOnImage": true,
"marginLeft": 0.15,
"marginRight": 0.15,
"marginUp": 0.2,
"marginDown": 0.1,
"aspectRatio": "4:3",
"smoothMovement": false,
"photosSorted": false,
"reverseYaw": true,
"singleBillboardHeight": -1.0,
"globalBillboardVerticalAlign": 1.0,
"bboxStabilization": false,
"carBodyClassRescale": true
},
{
"processorName": "AnchoringApplyProcessor"
}
]
Example results
CarColorClassificationProcessor
The processor detects paint color based on uploaded car photo.
Parameters
- No parameters required.
Example of usage
[
{
"processorName": "ReadExifDataProcessor",
"rotate": true
},
{
"processorName": "DetectCarMaskProcessor",
"carDetectionThreshold": 0.0,
"carCropThreshold": 0.0,
"estimateMaskScore": false
},
{
"processorName": "CarColorClassificationProcessor"
}
]
Example results
WindowSegmentationProcessor
It extracts the windows segmentation mask for external images of vehicles with all doors closed ar all doors open. It has to be called before: SemiTransparentWindowsProcessor.
Parameters
confidenceThreshold- Value from 0 to 1, by default0.3. Threshold for windows detection score.
Example of usage
[
{
"processorName": "ReadExifDataProcessor",
"rotate": true
},
{
"processorName": "DetectCarMaskProcessor",
"carDetectionThreshold": 0.0,
"carCropThreshold": 0.0,
"estimateMaskScore": false
},
{
"processorName": "CarKeyPointsProcessor",
"carDetectionThreshold": 0.0
},
{
"processorName": "WindowSegmentationProcessor",
"confidenceThreshold": 0.3
},
{
"processorName": "SemiTransparentWindowsProcessor",
"windowTransparency": 0.15,
"windowBrightness": 0.0,
"minWindowSize": 0.001,
"minWindowBrightness": 0.15
},
{
"processorName": "DetectCarShadowProcessor",
"detail": false
},
{
"processorName": "PlaceShadowProcessor",
"background": "#ffffff",
"shadowOpacity": 0.9,
"shadowSize": 0.5,
"advancedShadowEnabled": true,
"advancedShadowShift": 0.25,
"advancedShadowStrength": 0.5
}
]
AnchoringApplyProcessor
It is used to apply changes set in AnchoringComputeProcessor and PlaceCarComputeProcessor processors.
Parameters
brightness- Value from -1 to 1, by default0.0. Adjusts the overall brightness of the image.contrast- Value from -1 to 1, by default0.0. Adjusts the overall contrast of the image.luminance- Value from -1 to 1, by default0.0. Adjusts the overall luminance of the image.saturation- Value from -1 to 1, by default0.0. Indicates color intensity, measured in percentages from 0% (gray) to 100% (full saturation).hue- Value from -1 to 1, by default0.0. Determines the color in the color spectrum, measuring it in degrees from 0 to 360, where each angle corresponds to a different color.temperature- Value from -1 to 1, by default0.0. Adjusts the overall temperature of the image.exposure- Value from -1 to 1, by default0.0. Adjusts the overall exposure of an image.
Example of usage
[
{
"processorName": "DetectCarMaskProcessor"
},
{
"processorName": "ChangePlateProcessor",
"background": "original",
"blurKernelSize": 0.5
},
{
"processorName": "CarKeyPointsProcessor"
},
{
"processorName": "RollCompensationProcessor"
},
{
"processorName": "AnchoringComputeProcessor",
"width": -1,
"height": 1080,
"billboards": [
"none"
],
"backgroundDirectory": "platform_1",
"billboardReflection": false,
"carScale": 0.8,
"cropCar": false,
"keepCarOnImage": true,
"marginLeft": 0.0,
"marginRight": 0.0,
"marginUp": 0.0,
"marginDown": 0.0,
"aspectRatio": "4:3",
"photosSorted": false,
"reverseYaw": true
},
{
"processorName": "AnchoringApplyProcessor"
"brightness": 0.0,
"contrast": 0.0,
"luminance": 0.0,
"saturation": 0.0,
"hue": 0.0,
"temperature": 0.0,
"exposure": 0.0
}
]
HorizontalStabilizationApplyProcessor
It is used to apply the changes set in HorizontalStabilizationComputeProcessor processor.
Proper Scope
To apply horizontal stabilization you have to call first CarKeyPointsProcessor and HorizontalStabilizationComputeProcessor.
Parameters
- No parameters required.
Example of usage
[
{
"processorName": "DetectCarMaskProcessor"
},
{
"processorName": "CarKeyPointsProcessor"
},
{
"processorName": "HorizontalStabilizationComputeProcessor",
"width": -1,
"height": -1,
"marginLeft": 0.15,
"marginRight": 0.15,
"marginUp": 0.2,
"marginDown": 0.1,
"aspectRatio": "4:3",
"photosSorted": false,
"reverseYaw": true,
"blurKernelSize": 0.076389,
"blurLineDelta": 0,
"blurGradient": 0.1,
"blurBackground": "original",
"curtainEnabled": false
},
{
"processorName": "HorizontalStabilizationApplyProcessor"
}
]
DetectCarShadowProcessor
Detects shadow for exterior cars images (open and closed doors).
This is more sophisticated version of shadow - to save costs you should used enableShadow parameter in CleanBackgroundProcessor.
Proper Scope
To apply a shadow you have to call PlaceShadowProcessor afterwards.
Parameters
detail- true/false, by defaultfalse. Iftrue, the shadow to the detail is selected, whenfalseit is the shadow to the exterior.
Example of usage
[
{
"processorName": "DetectCarMaskProcessor"
},
{
"processorName": "WindowSegmentationProcessor",
"confidenceThreshold": 0.3
}
{
"processorName": "SemiTransparentWindowsProcessor",
"windowTransparency": 0.15,
"windowBrightness": 0.0
},
{
"processorName": "DetectCarShadowProcessor"
"detail": true
},
{
"processorName": "PlaceShadowProcessor",
"background": "#FFFFFF",
"shadowOpacity": 0.9,
"shadowSize": 0.5,
"advancedShadowEnabled":false,
"advancedShadowShift": 0.25,
"advancedShadowStrength": 0.5
}
]